TP A.4 Траектория движения битка после соударения для различных вариантов углов резки, скоростей битка и винтов
Уравнение поступательного движения битка (после соударения):
| (1) |
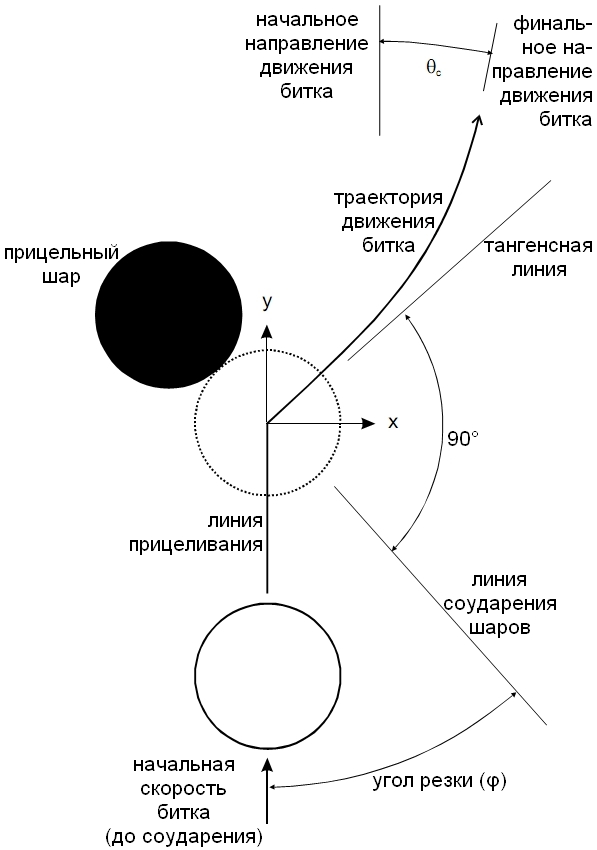
где F - сила трения между битком и сукном во время того, как биток движется по дуге, а v - это скорость центра битка.
Уравнение для вращения битка (после соударения):
| (2) |
где М - момент силы трения относительно центра битка и ω - угловая скорость битка.
Скорость (С) в точке контакта между битком и сукном равна:
 (3)
(3)
Обратите внимание, что z-соствляющая вращения (ωz - возникшая в результате бокового вращения) не будет оказывать влияние на скорость точки контакта, и, следовательно, не повлияет на остальную часть анализа.
Сила трения (μmg) противодействует скольжению и направлена в против направления относительной скорости скольжения:
| (4) |
Момент трения может быть выражен следующим образом:

| (5) |
Взяв производную по времени в левой части уравнения 3, мы можем связать линейные и угловые ускорения:
| (6) |
Подставляя уравнение 4 в уравнение 1 получаем ускорение битка:
| (7) |
Подставляя уравнение 5 в уравнение 2 получаем угловое ускорение битка:
| (8) |
Поэтому последнее слагаемое в уравнении 6 можно записать в виде:

| (9) |
Подставляя уравнения 7 и 9 в уравнении 6 получаем:

| (10) |
Проанализировав уравнение 10 делаем следующие выводы:
Вектор относительной скорости и, следовательно, вектор силы трения (смотри уравнение 5) не меняют направления!!!
Относительная скорость скольжения падает до нуля, и после этого остаётся равной нулю
(то есть, биток в определённый момент начинает катиться без проскальзования и продолжает катиться по прямой линии).
Кроме того, из уравнений 4 и 7 следует, что вектор силы трения и ускорения битка являются постоянными (по величине и направлению).
Таким образом, траектория битка будет параболической, как в случае любого движения с постоянным ускорением (например, движение снаряда).
Из уравнения 10 ясно, что относительная скорость меняется в зависимости от:
| (11) |
Таким образом, относительная скорость варьируется в зависимости от:
| (12) |
где vc0 является начальной относительной скорости (сразу после соударения с прицельным шаром).
Итак, изменение с течением времени вектора относительной скорости:
| (13) |
Если начальные линейная и угловая скорости битка (сразу после соударения с прицельным шаром) указаны, то уравнение 3 даёт:
 (14)
(14)
Величина начальной относительной скорости определяется по формуле:

| (15) |
и направление начальной относительной скорости (которая остается постоянной) составляет:

| (16) |
Используя уравнение 16 в уравнении 7, теперь мы знаем ускорения битка:
| (17) |
Решение этого уравнения:
| (18) |
Это уравнение применимо только во время скольжения битка. Когда скольжение прекращается, биток движется по прямой линии - касательной к траектории движения битка. Время, в течении которого биток движется со скольжением, можно найти из уравнения 12:
| (19) |
Таким образом, траектория движения битка будет изогнута только в течении следующего времени:
| (20) |
Финальный угол отклонения битка можно найти, посмотрев на наклон тректории в момент времени, определямый уравнением 20.
Из уравнений 16 и 18, используя уравнение 20, получаем финальные составляющие скорости битка:
 (21)
(21)
и
 (22)
(22)
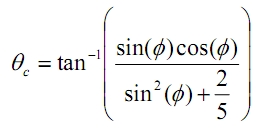
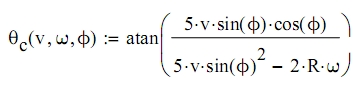
Таким образом, финальный угол отклонения битка равен:
| (23) |
Финальная скорость битка vf (уравнения 21 и 22) может также быть выражена в векторном виде:
| (24) |
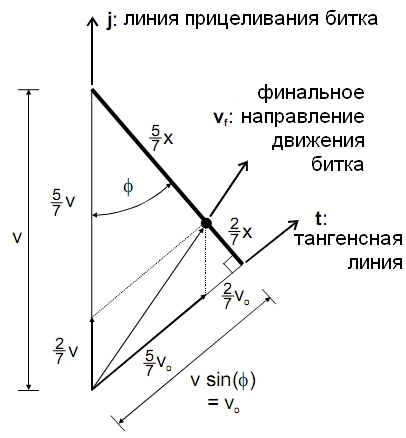
где vo - начальная скорость битка после соударения, ωo - начальная угловая скорость. Интересно, что конечная скорость не зависит от трения μ. 5/7 (71.4%) финальной скорости образуется от вектора начальной скорости (vo) в направлении тангенсной линии, а 2/7 (28.6%) образуется от вектора начальной скорости вращения (ωo x r). Вектор r - вектор, направленный из точки покоя в центр шара (то есть, r = - R).
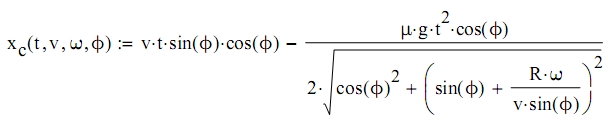
Уравнение 18 может быть проинтегрировано для нахождения координат х и у траектории движения битка:
| (25) |
| (26) |
Теперь ясно, что траектория представляет собой параболу. Уравнения 25 и 26 применяются только в течение времени, полученного из уравнения 20.
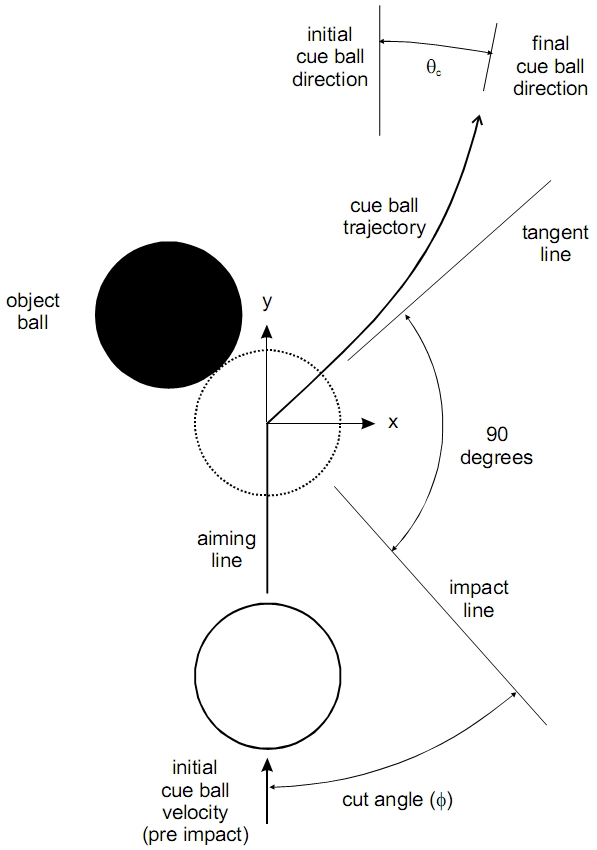
Учитывая начальную скорость битка (v) в направлении у, и пренебрегая трением между битком и прицельным шаром (на данный момент), составляющие скорости битка после соударения (смотри рисунок ниже и в TP 3.1) будут равны:
| (27) |

| (28) |
| (29) |
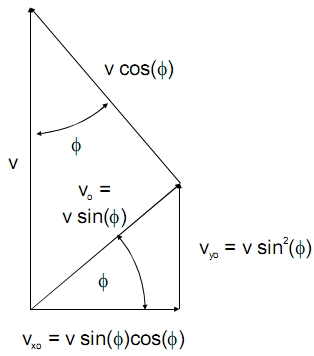
Если предположить, что биток не имеет вращения относительно оси y (то есть, ωyo = 0, что означает, что удар только с накатом, оттяжкой или клапштос),
то уравнение 15 (с использованием уравнений 28 и 29) примет вид:
 (30)
(30)
где ω - начальный винт битка по оси х.
И из уравнения 14:

| (31) |

| (32) |
И из уравнения 23:

| (33) |
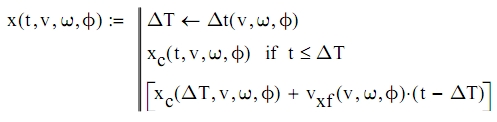
Используя уравнения 28-32 в уравнениях 25 и 26, траектория битка будет выглядеть так:
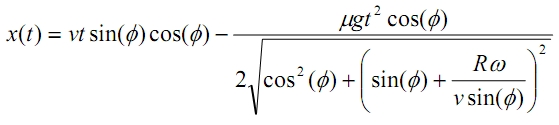
| (34) |
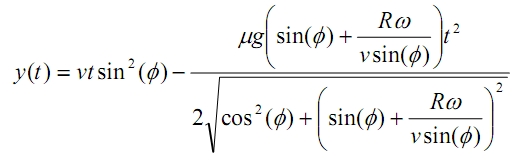
| (35) |
Из уравнений 20 и 30 мы видим, что уравнения 34 и 35 применяются только для времени от нуля ДО:
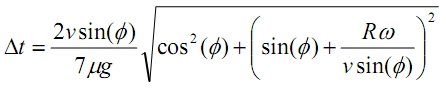
| (36) |
Если в момент соударения с прицельным шаром биток катится без проскальзования, то:

| (37) |
и уравнение 33 сводится к:
| (38) |
Это согласуется с известным результатом, открытым Уоллесом и Шрёдером в 1987 году, который лёг в основу Правила 30 градусов (смотри TP 3.3).
Кроме того, для катящегося битка уравнение 24 (с использованием уравнений 27 и 37) примет вид:

| (39) |
где t - направление тангенсной линии, j - начальная траектория битка (то есть, линия прицеливания). На рисунке ниже показаны следствия этого очень полезного результата, используя подобные треугольники. Финальное направление движения битка проходит через 2/7 отрезка между тангенсной линией и линией прицеливания, построенного перпендикулярно тангенсной линии. Этот результат верен для битка, имеющего естественный накат, для любого угла резки и любой скорости.
Теперь мы посмотрим на траектории битка для различных типов ударов. Уравнения 34 и 35 описывают общие траектории для наката, оттяжки и клапштоса. Это применимо только в течение интервала времени, полученного из уравнения 36. Ниже представлены параметры, используемые в уравнениях при расчёте с использованием MathCAD:
Примечание: Все параметры выражены в метрической системе (СИ).
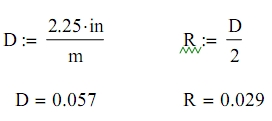
параметры шара:
коэффициент трения между битком и сукном:

| приближённое значение (также проверено экспериментально) |
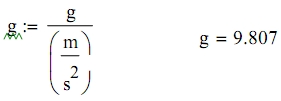
Ускорение свободного падения:
время, необходимое битку для образования естественного наката (прекращения скольжения):

| из уравнения 36 |
составляющие скорости когда биток начинает катиться по прямой линии:

| из уравнений 21 и 28 |

| из уравнений 22 и 29 |
финальный угол отклонения битка:
| из уравнений 23б 28 и 29 |
координата х битка во время движения по дуге:
| из уравнения 34 |
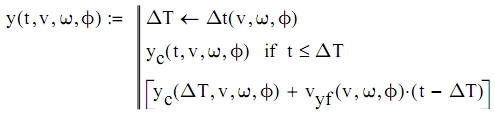
координата х битка во время и после движения по дуге:
координата y битка во время движения по дуге:
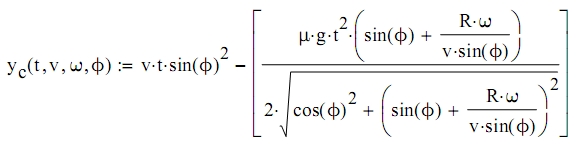
| из уравнения 35 |
координата y битка во время и после движения по дуге:
Параметры, используемые для построения графиков ниже:

| количество отображаемых секунд |
| временной интервал для построения |
| угол резки для удара в полшара |
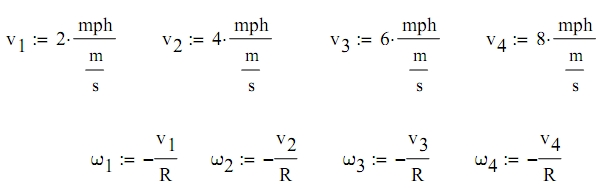
| средняя скорость преобразованная из миль/час в м/с |

| скорость вращения |
| угол отклонения битка |
Уравнение для тангенсной линии:
Уравнение для шара (для масштаба):
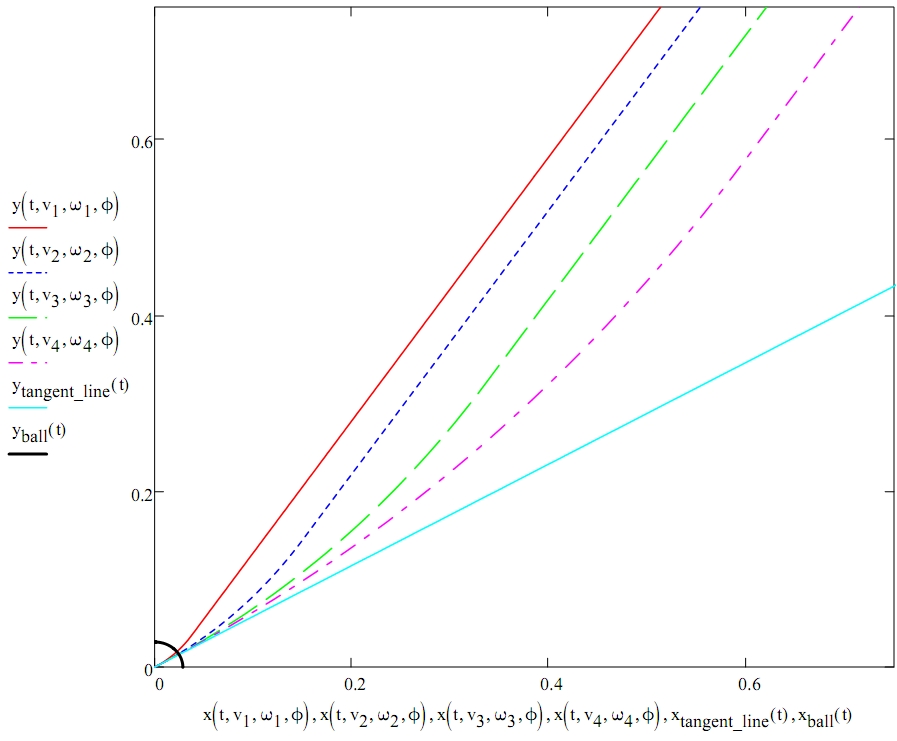
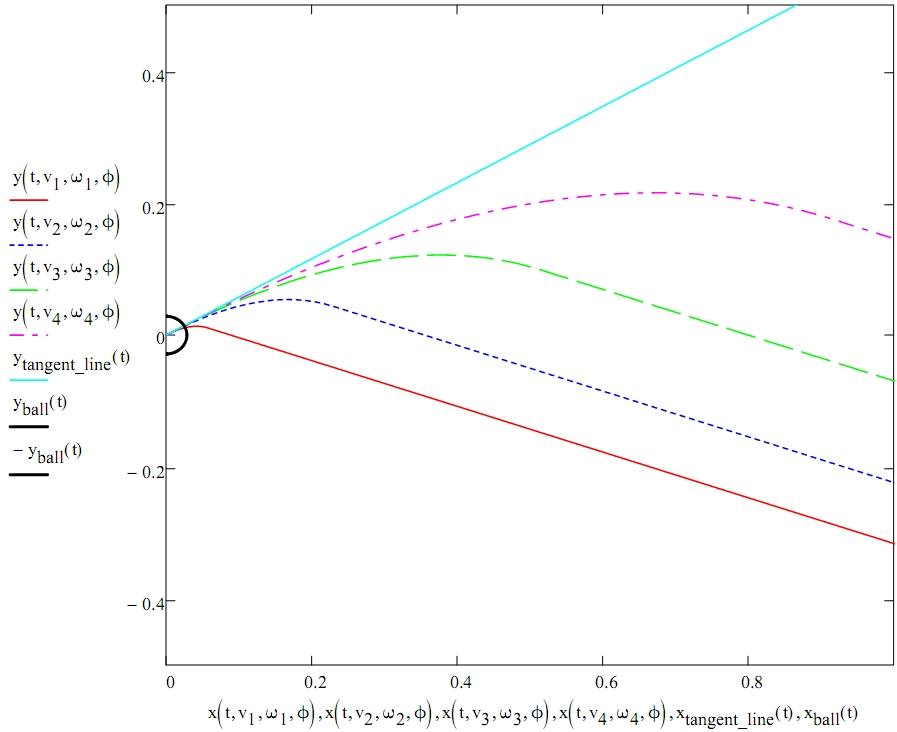
Различные варианты ударов с естественным накатом
Различные скорости от тихой до быстрой:
Различные варианты оттяжек (с обратным естественным накатом)

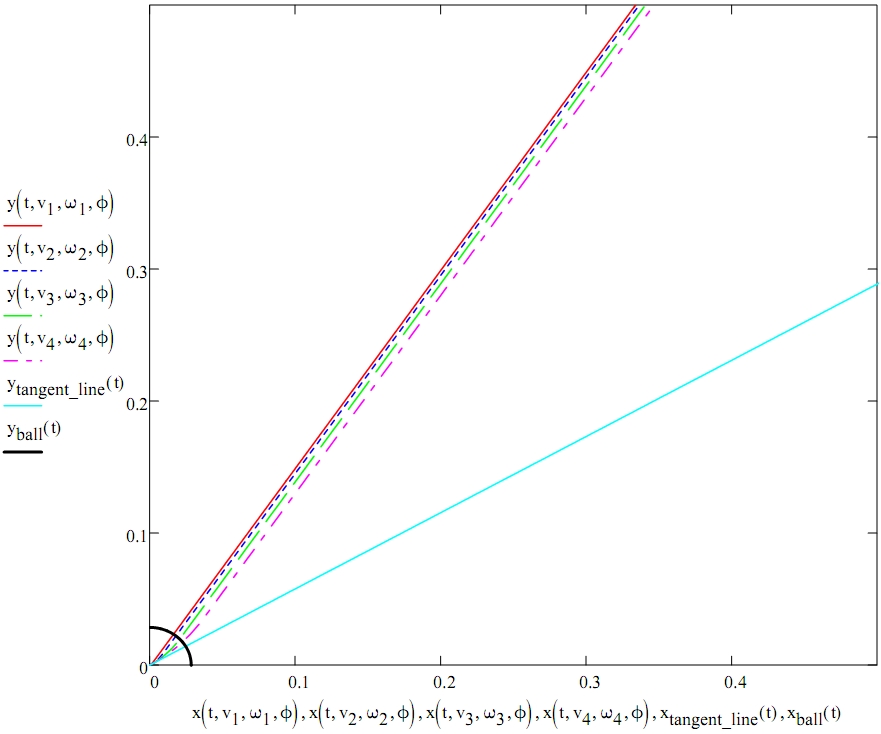
Различные варианты очень тихих ударов с естественным накатом
TP A.4 Post-impact cue ball trajectory for any cut angle, speed, and spin
The translational equation of motion for the cue ball (after impact) is:
|
| (1) |
where F is the friction force between the table cloth and the cue ball during the curved trajectory and v is the velocity of the center of the cue ball.
The rotational equation of motion for the cue ball (after impact) is:
|
| (2) |
where M is the moment of the friction force about the center of the cue ball and ω is the angular velocity of the cue ball.
The velocity of the contact point (C) between the cue ball and the table cloth is:
(3)
Note that z-axis spin (ωz, resulting from side English) would have no effect on the contact point velocity, and therefore would not affect the remainder of this analysis.
The friction force (μmg) opposes the slip, in a direction opposite from the relative slip velocity direction:
|
| (4) |
The friction moment can be expressed as:
|
| (5) |
Taking the time derivative of the left side of Equation 3, we can relate the linear and angular accelerations:
|
| (6) |
Substituting Equation 4 into Equation 1 gives the cue ball acceleration:
|
| (7) |
Substituting Equation 5 into Equation 2 gives the cue ball angular acceleration:
|
| (8) |
Therefore the last term in Equation 6 can be written as:
|
| (9) |
Substituting Equations 7 and 9 into Equation 6 gives:
|
| (10) |
The following conclusions can be made concerning Equation 10:
The relative velocity vector, and therefore the friction force vector (see Equation 4), does not change direction!!!
The relative slip speed slows to 0 and remains 0 thereafter (i.e., the cue ball starts rolling without slipping at a certain point and continues to roll in a straight line).
Also, from Equations 4 and 7, the friction force vector and the cue ball acceleration are constant (in magnitude and direction).
Therefore, the cue ball trajectory will be parabolic, just as with any constant acceleration motion (e.g., projectile motion).
From Equation 10, it is clear that the relative speed changes according to:
|
| (11) |
Therefore, the relative speed varies according to:
|
| (12) |
where vc0 is the initial relative speed (immediately after object ball impact).
So, now, the relative velocity vector is known over time:
|
| (13) |
If the initial cue ball linear and angular velocities (immediately after object ball impact) are specified, Equation 3 gives:
(14)
The initial relative velocity magnitude (speed) is given by:
|
| (15) |
and the direction of the initial relative velocity (which remains constant) is:
|
| (16) |
Using Equation 16 in Equation 7, we now know the cue ball acceleration
|
| (17) |
The solution to this equation is:
|
| (18) |
This equation applies only while the cue ball is sliding. When sliding ceases, the cue ball moves in a straight line tangent to the trajectory at that point. The time it takes for sliding to cease can be found from Equation 12:
|
| (19) |
So the cue ball path will be curved only for the following duration (after object ball impact)
|
| (20) |
The final deflected angle of the cue ball path can be found by looking at the slope of the trajectory at the time given by Equation 20.
From Equations 16 and 18, using Equation 20, the final components of the cue ball velocity are:
(21)
and
(22)
Therefore, the final deflected cue ball angle is:
|
| (23) |
The final ball velocity vf (Equations 21 and 22) can also be expressed in the following vector form:
|
| (24) |
where vo is the initial post-impact velocity, and ωo is the initial angular velocity. Intere stingly, the final velocity does not depend on friction µ. 5/7 (71.4%) of the final velocity comes from the initial velocity vector (vo) in the tangent-line direction, and 2/7 (28.6%) comes from the initial spin velocity vector (ωo x r). The r vector is straight up from the resting point to the center of the ball (i.e., r = -R, relating it to the R vector above).
Equation 18 can be integrated to find the x and y coordinates of the cue ball trajectory:
|
| (25) |
|
| (26) |
Now it is clear that the trajectory is a parabola (see also the paragraph after Equation 10). Equations 25 and 26 apply only for the time period given by Equation 20.
Given the initial cue ball speed (v) in the y direction, and neglecting the friction between the cue ball and object ball (for now), the post-impact cue ball speed and speed components are (see the figure below and TP 3.1 for more details):
|
| (27) |
|
| (28) |
|
| (29) |
If we assume the cue ball has no y-axis spin (i.e., ωyo = 0, which means the shot has only follow, draw, or stun), then Equation 15 (using Equations 28 and 29) becomes:
(30)
where ω is the initial spin of the cue ball about the x axis.
And from Equation 14,
|
| (31) |
|
| (32) |
And from Equation 23,
|
| (33) |
Using Equations 28 through 32 in Equations 25 and 26, the cue ball trajectory becomes:
|
| (34) |
|
| (35) |
From Equation 20 and 30, we see that Equations 34 and 35 apply only from time 0 to time:
|
| (36) |
If the cue ball is rolling without slipping at object ball impact, then:
|
| (37) |
and Equation 33 reduces to:
|
| (38) |
This agrees with the famous result from the 1987 Wallace and Schroeder paper, which formed the basis for the 30 degree rule (see TP 3.3).
Also, for a rolling cue ball, Equation 24 (using Equations 27 and 37) becomes:
|
| (39) |
where t is the tangent line direction and j is the original direction of the rolling cue ball (i.e., the aiming line). The figure below shows the implications of this very useful result, using similar triangles. The final ball direction is at 2/7 of the distance x between the tangent line and aiming line, measured perpendicular to the tangent line (i.e., parallel to the impact line). This result is true for a rolling cue ball at any cut angle and speed.
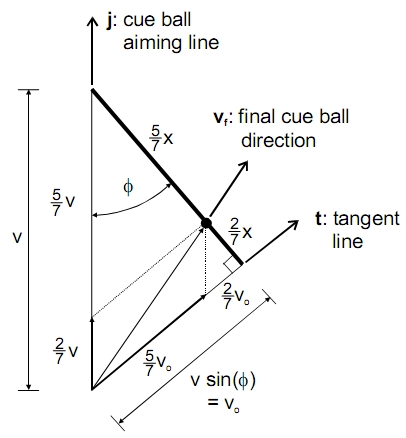
In Bob Jewett's July '08 Billiards Digest article, he shows how you can use the cue stick to help predict the final cue ball direction for a rolling cue ball shot. If you hold the cue stick (of length "x") perpendicular to the tangent line (i.e., parallel to the impact line), with one end of the cue stick on the aiming line and the other end on the tangent line, then the final direction of the cue ball will be at the 2/7 point along the cue (at 2/7 x) from the tangent line. Now, even though shot speed doesn't affect the final direction of the cue ball, it does affect the path to the final direction, so this also needs to be taken into consideration when predicting where the cue ball will travel (see the plots below and my June '05 Billiards Digest article).
Now we will look at ball trajectories for various types of shots. Equations 34 and 35 describe the general trajectories for follow, draw, and stun shots. They apply only during the time interval given by Equation 36. Here are the parameters used in the equations along with MathCAD form of the results:
NOTE: All parameters are expressed in metric (SI) equivalent values for dimensionless analysis
ball properties:
coefficient of friction between the cue ball and table cloth:
|
| approximate value from several references (also backed up by my own experiment) |
gravity:
time required for cue ball to start rolling (cease sliding):
|
| from Equation 36 |
velocity components when cue ball starts rolling in a straight line:
|
| from Equations 21 and 28 |
|
| from Equations 22 and 29 |
the final deflected cue ball angle:
|
| from Equations 23, 28, and 29 |
x position of the cue ball during the curved trajectory:
|
| from Equation 34 |
x position of the cue ball during and after the curved trajectory:
y position of the cue ball during the curved trajectory:
|
| from Equation 35 |
y position of the cue ball during and after the curved trajectory:
Parameters used in plots below:
|
| number of seconds to display |
|
| 0.01 second plotting increment |
|
| cut angle for 1/2-ball hit |
|
| average speed in mph converted to m/s |
|
| roll speed |
|
| deflected cue ball angle |
Equation for the tangent line:
Equation for the ball (for scale)
various follow shots with natural roll
various speeds (in mph, converted to m/s) from slow to very fast:
various draw shots with reverse natural roll
various slower speed follow shots with natural roll